会议聚焦演化博弈论的发展及其与人工智能理论的融合与应用,深入探讨了演化博弈论与强化学习、大模型、脑科学、群体认知决策等人工智能前沿领域的深度交叉,并拓展至计算神经科学与社会智能等相关方向,致力于推动“为人工智能服务的科学”(Science for AI)的未来发展。本届会议共吸引了来自全球超过40所高校与科研机构的110余名专家学者和师生参会,现场交流热烈,思想火花频现。
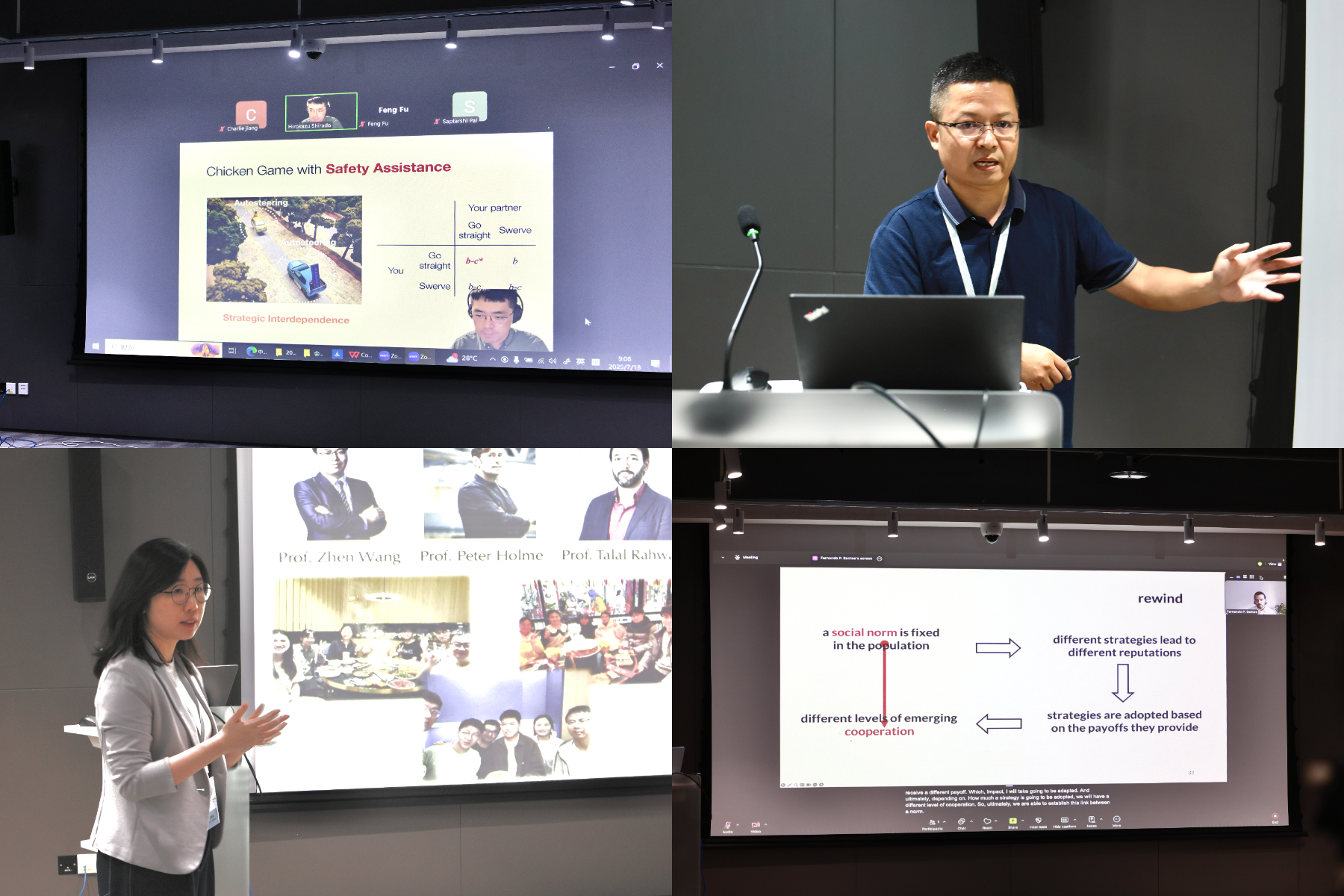
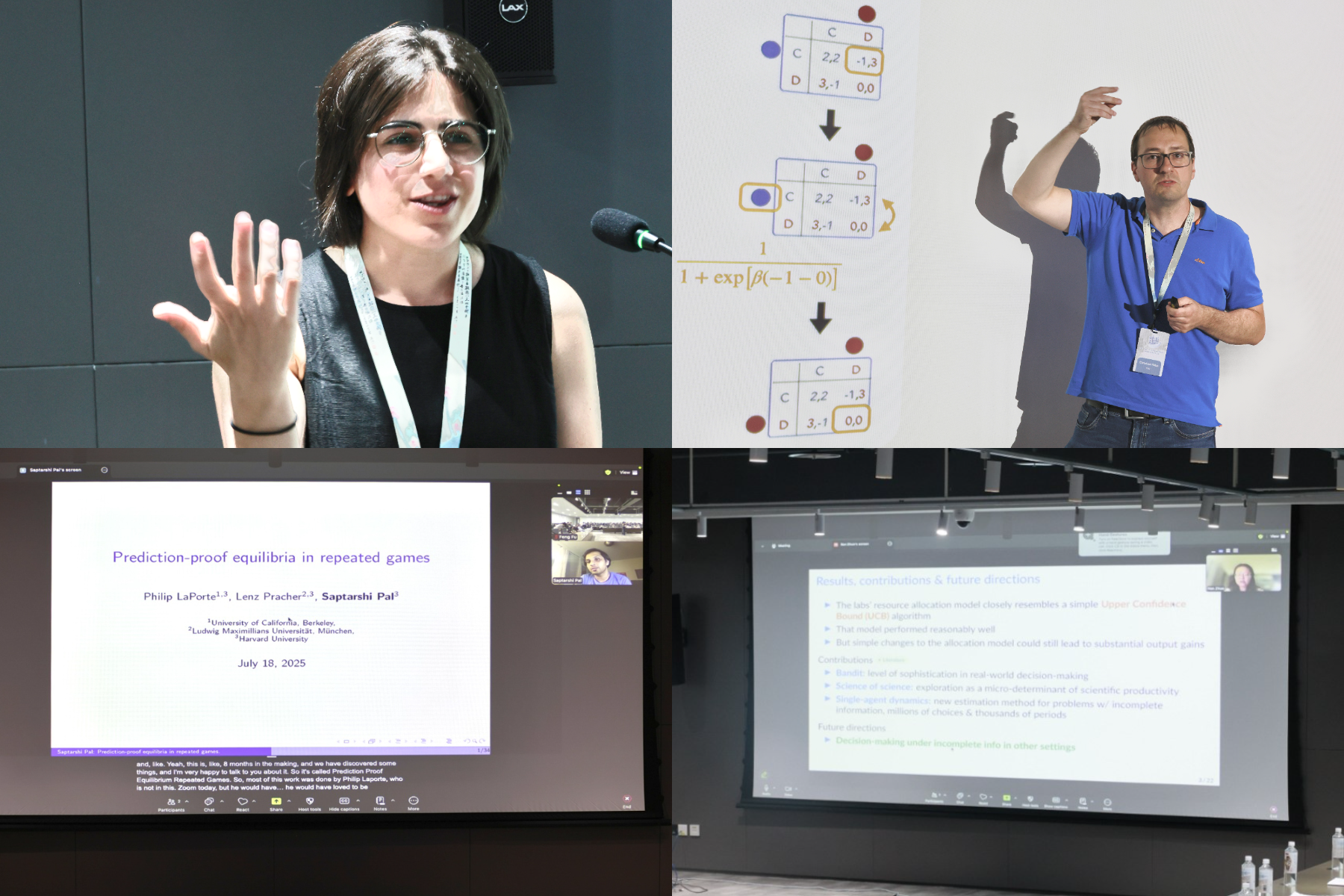
会议期间,多位专家在线上线下为师生们带来了精彩纷呈、启发深远的学术报告,激发了热烈的学术讨论。卡内基梅隆大学的Hirokazu Shirado教授以无人驾驶中的冲突协调问题为切入点,提出如何用人机混合智能提升系统的决策水平;电子科技大学的陈小杰教授以演化博弈为理论基础,剖析了群体策略演化、群体决策的复杂动态及其调控方法;上海人工智能实验室的胡舒悦研究员系统介绍了基于大语言模型的多智能体系统中合作行为与社会规范的演化和涌现;阿姆斯特丹大学的Fernando P. Santos教授介绍了大语言模型如何评判并影响人类决策;日本理化学研究所的Nikoleta E. Glynatsi研究员分享了其在寻找重复博弈占优策略方面的理论与应用成果,并以开源社区贡献者的身份,进行了面向博弈论的Python编程教学;奥地利IT:U的Christian Hilbe教授深入讲解了非最优学习机制的演化及其在不同类型博弈中的影响;哈佛大学的Saptarshi Pal博士介绍了重复博弈中单步记忆策略的纳什均衡及其性质;密歇根大学的Ran Zhuo教授以NIH基金分配决策问题为背景,基于大规模实证数据提出了高效的算法模型,助力社会资源分配与创新研究;北京大学的朱露莎教授介绍了如何结合人类行为实验、计算建模、fMRI和图神经网络,研究具有社交网络结构的群体学习、表示和决策过程的系列进展。
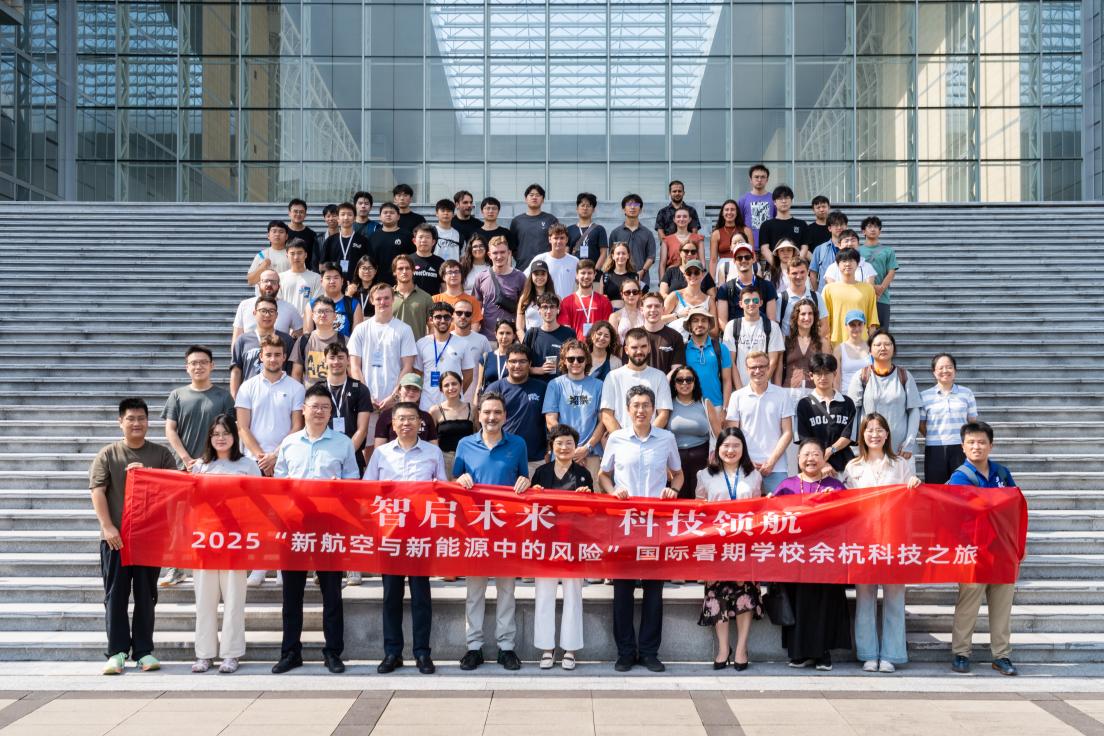
北航新闻网7月23日电(通讯员 苏力)2025年是中国与西班牙建立全面战略伙伴关系20周年。近日,瓦伦西亚理工大学日·杭州(UPV Day@Hangzhou)暨北航国际暑期学校(Beihang International Summer School, BISS)在北航杭州国际校园举办。
欢迎仪式上,瓦伦西亚理工大学校长何塞·卡比亚(Jose CAPILLA)、副校长何塞·F·蒙塞拉特(Jose F. MONSERRAT),杭州市委教育工委专职副书记、市教育局党组副书记陈萍,杭州市外事办公室党组成员、二级巡视员谭清海,北航校长助理、国新院院长董卓宁,余杭区相关部门负责人等出席。北航国新院教师代表以及包括13名UPV学生在内的近500名北航国际暑期学校师生参加活动。欢迎仪式由北航国新院副院长张巍主持。
欢迎仪式结束后的特邀学术报告会上,UPV何塞·蒙塞拉特教授作题为“Channel compression in 6G massive MIMO systems”的学术报告,伊瓦娜·加苏利亚(Ivana GASULLA)教授以“Space-division multiplexing optical fibers: Unlocking the Spatial Dimension for Signal Processing”为题,分享了最新研究进展,报告现场互动热烈。
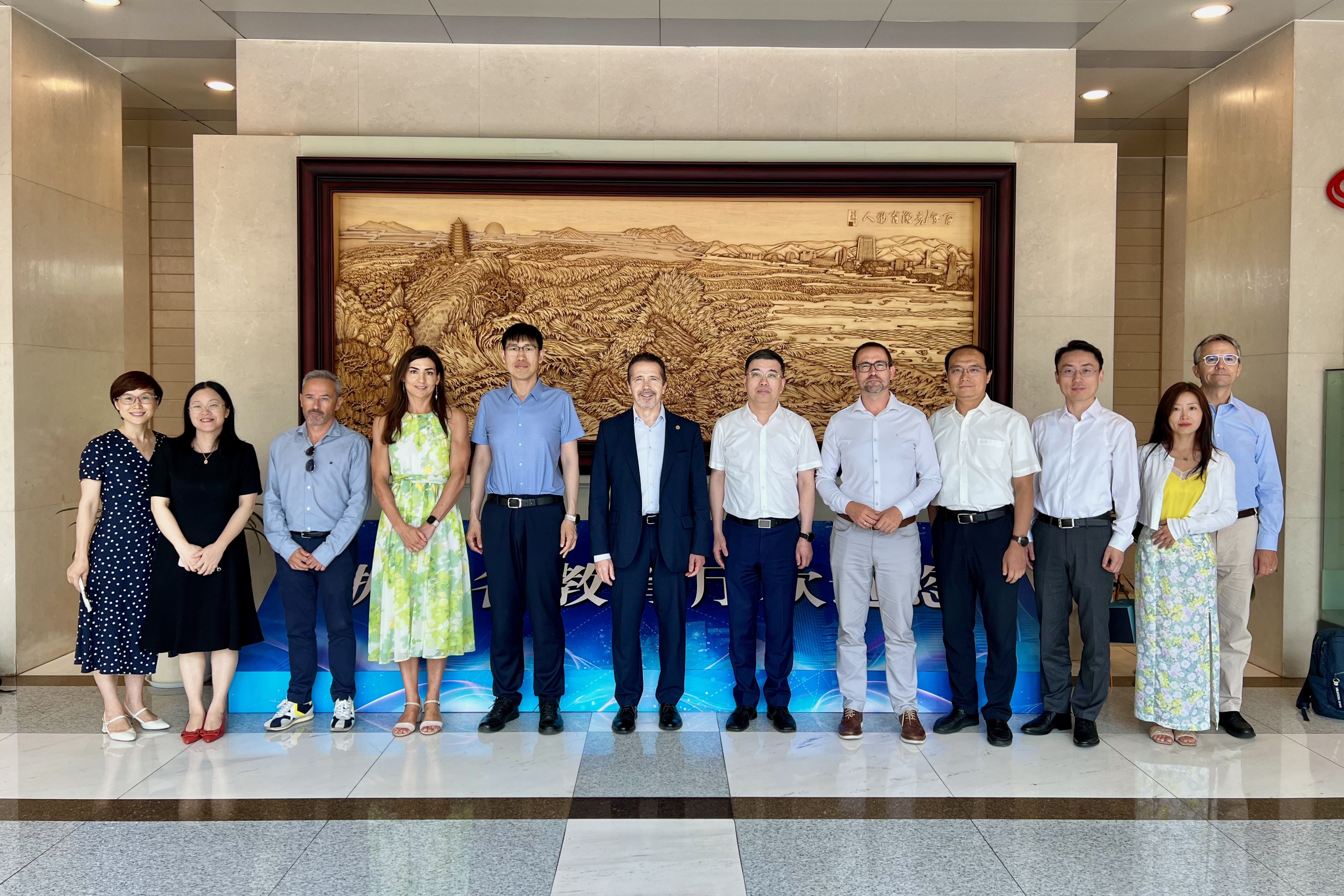
7月4日,北京航空航天大学代表团访问了巴西圣保罗大学,与绿色创新研究中心(RCGI-USP)签署了共建北航-圣保罗大学绿色航空实验室(Beihang USP Green Aviation Laboratory—BUGA Lab)合作协议。巴西科学院院士、RCGI主任胡里奥·梅内吉尼(Julio Romano Meneghini)教授、圣保罗大学圣卡洛斯化学学院院长汉密尔顿·瓦雷拉(Hamilton Varela)教授,北航校长助理、国新院院长董卓宁教授,北航巴西中心和能源与动力工程学院刁训刚教授分别代表双方签署协议。未来,实验室将充分依托北航巴西中心、北航巴西创新研究院、圣保罗大学,利用双方优势资源共同推动绿色航空能源发展,开展包括双学位学生培养、联合科研项目、高水平学术会议、教师交流互访等多方面实质性合作。实验室将成为北航巴西中心在杭州成立的第一个中巴合作联合实验室,绿色航空也将成为北航巴西中心为促进中巴科技合作交流着力建设的一个优先发展方向。
北京航空航天大学研究团队在《皇家学会会报B辑》发表了题为“Passive mechanisms in flying insects and applications in bio-inspired flapping-wing micro air vehicles”的综述论文,该研究系统梳理了昆虫飞行系统中被动机制的研究进展,阐释了仿生原理如何启发工程设计,提出了昆虫飞行力学的关键未解之谜,为新一代微型飞行机器人的研发提供了重要思路。 北航国新院为第一完成单位,北航国新院郝金晶博士后为论文的第一作者,北航张艳来副教授、北航程诚博士研究生为共同作者,北航吴江浩教授为论文通讯作者。
昆虫是地球上最古老的飞行生物,距今已有3亿年的进化历程,其卓越的飞行能力令人惊叹。然而,昆虫的大脑资源极其有限,超过60%都用于处理视觉信息,留给飞行控制的“算力”非常有限。昆虫如何在神经资源匮乏的情况下,实现高效、稳健的飞行呢?答案就在于被动机制。这些机制来源于固有的生物力学特性,无需大脑发出指令就能自动发挥作用,是昆虫高效飞行的重要因素。
昆虫通过翅膀运动产生支持飞行的升力。身体两侧的翅膀通过胸腔内部的特殊结构实现机械联动,保持运动的同步和协调。同时,源于自身的材料柔性和褶皱结构,翅膀在运动过程中与周围空气相互作用而自发地变形,有助于增强升力、提升能量利用效率。在遭遇气流扰动时,气动阻尼伴随身体旋转而产生,帮助昆虫应对飞行稳定的挑战。被动机制与主动控制相辅相成,共同塑造了昆虫非凡的飞行本领。
昆虫卓越的飞行能力,推动了可悬停扑翼微型飞行器的研发。通过模仿和改造生物飞行原理,研究人员已成功开发出多种原型机,实现了从毫克级到克级扑翼的飞行。科学家们希望通过从昆虫飞行中进一步汲取灵感,打造新一代微型飞行机器人。
 [复制链接]
[复制链接]



 IP卡
IP卡 狗仔卡
狗仔卡 发表于 2025-7-21 12:25:58
发表于 2025-7-21 12:25:58

 显身卡
显身卡